

Roboty humanoidalne w 2026 roku przestają być technologiczną ciekawostką, a zaczynają być realnym elementem globalnej transformacji przemysłu i usług. To już nie demonstratory z targów technologicznych, lecz systemy testowane w magazynach, fabrykach i przestrzeniach publicznych. Coraz częściej pojawiają się w pilotażowych wdrożeniach, a inwestycje w ten segment liczone są w miliardach dolarów.
Rozwój sztucznej inteligencji, spadek kosztów komponentów oraz strategiczny wyścig technologiczny między Chinami a USA sprawiają, że robot humanoidalny staje się czymś więcej niż eksperymentem. Pytanie nie brzmi już „czy potrafi chodzić”, ale „czy potrafi pracować”.

Czym są roboty humanoidalne w 2026 roku?
W teorii definicja jest prosta: roboty humanoidalne to maszyny zaprojektowane na wzór ludzkiego ciała – z nogami, rękami i „głową” wyposażoną w sensory. W praktyce jednak różnica między robotem humanoidalnym z 2015 roku a konstrukcją z 2026 roku jest gigantyczna.
Dzisiejszy robot humanoidalny nie jest tylko mechaniczną kopią człowieka. To system cyber-fizyczny, w którym:
-
biomechanika jest wspierana przez dziesiątki silników o wysokim momencie obrotowym,
-
sensoryka opiera się na kamerach stereo, lidarach i czujnikach siły,
-
decyzje podejmowane są przez modele AI analizujące obraz, kontekst i polecenia językowe.
Kluczowe jest to, że roboty humanoidalne są projektowane tak, by funkcjonować w świecie zbudowanym dla ludzi. Klatki schodowe, drzwi, półki magazynowe, narzędzia – wszystko to jest dostosowane do ludzkiej anatomii. Zamiast przebudowywać infrastrukturę, próbujemy dopasować do niej maszynę.
Może Cię zainteresować: Humanoid za 20 tys. dolarów – czy robot domowy staje się realny?

Dlaczego 2026 to moment przełomowy dla robotów humanoidalnych?
Przez wiele lat rozwój robotów humanoidalnych hamowały trzy kluczowe bariery: ograniczona wydajność baterii, wysokie koszty napędów oraz brak wystarczająco zaawansowanej inteligencji operacyjnej. Sam mechaniczny chód został opanowany już wcześniej, jednak brakowało elementów, które pozwoliłyby humanoidom wyjść z laboratoriów i wejść do realnego środowiska pracy.
W 2026 roku te trzy czynniki dojrzały niemal jednocześnie. Spadek kosztów elektroniki, silników elektrycznych i komponentów mechatronicznych — napędzany masową produkcją w Azji — sprawił, że robot humanoidalny przestał być konstrukcją ekstremalnie drogą w utrzymaniu. Równocześnie dynamiczny rozwój modeli językowych i systemów wizyjnych umożliwił analizę otoczenia w czasie rzeczywistym, rozpoznawanie obiektów oraz interpretację poleceń w języku naturalnym.
Trzecim, często niedocenianym elementem, jest rozwój symulacji cyfrowych. Dzięki tzw. digital twins i zaawansowanym środowiskom treningowym roboty humanoidalne mogą uczyć się wirtualnie, wykonując miliony prób bez ryzyka uszkodzenia sprzętu. To radykalnie skraca czas testów i przyspiesza iteracje projektowe.
Właśnie kumulacja tych technologii sprawia, że 2026 rok można uznać za punkt przejścia — od eksperymentu do pierwszych realnych wdrożeń komercyjnych.
Może Cię zainteresować: Sztuczna inteligencja 2026 – jak państwa wykorzystują AI w realnym życiu. Chiny, USA i Europa w nowej erze technologii

– strategia skali i przemysłowego wdrożenia
Roboty humanoidalne w Chinach rozwijają się w modelu, który można określić jednym słowem: skala. W przeciwieństwie do wielu zachodnich projektów, gdzie robot humanoidalny często pozostaje demonstratorem technologii, w Chinach humanoidy są traktowane jako element realnej strategii przemysłowej.
Rozwój ten jest bezpośrednio powiązany z transformacją gospodarki – rosnącymi kosztami pracy, presją wydajności oraz starzejącym się społeczeństwem. Państwo wspiera sektor robotyki w ramach szerszych programów technologicznych, co przekłada się na szybkie przechodzenie od prototypów do pilotaży w magazynach i fabrykach.
Chińskie podejście nie polega na budowie jednego „najbardziej spektakularnego” humanoida. Zamiast tego powstaje cały ekosystem: produkcja napędów, baterii, sensorów i integracja z systemami logistycznymi. Dzięki temu roboty humanoidalne mogą być szybciej testowane w realnym środowisku operacyjnym.
Co istotne, kluczowym czynnikiem jest koszt. Robot humanoidalny w Chinach ma być rozwiązaniem ekonomicznie uzasadnionym, a nie luksusową technologiczną wizją. To sprawia, że humanoidy coraz częściej pojawiają się w zakładach produkcyjnych jako element automatyzacji, a nie wyłącznie pokaz możliwości inżynieryjnych. W 2026 roku Chiny budują nie tylko technologię, ale przede wszystkim przewagę wdrożeniową.
Może Cię zainteresować: Chińskie roboty humanoidalne już pracują – zobacz, jak działają fabryki przyszłości
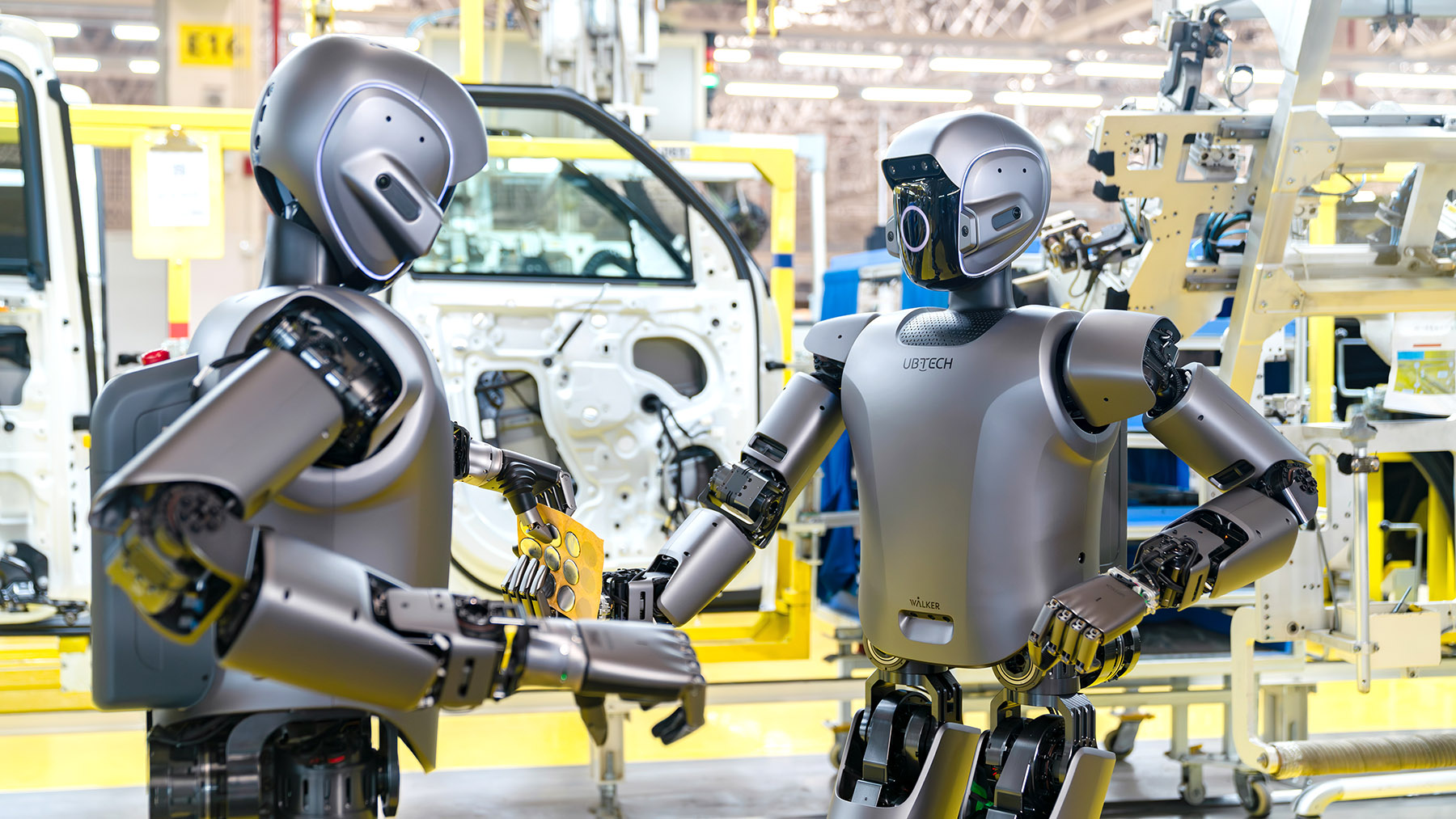
UBTECH Robotics – Walker X
Walker X to wyraźny przykład, jak roboty humanoidalne w Chinach przechodzą drogę od demonstracyjnych prototypów do realnych wdrożeń operacyjnych. Firma UBTECH rozwija swoje konstrukcje od lat, jednak w 2026 roku Walker nie pełni już wyłącznie roli robota pokazowego prezentowanego na targach technologicznych. Testy obejmują rzeczywiste środowiska pracy — hale przemysłowe, magazyny oraz przestrzenie publiczne — gdzie oceniana jest jego stabilność, niezawodność i efektywność energetyczna.
Walker X porusza się w sposób stabilny dzięki zaawansowanemu systemowi kontroli równowagi i dynamicznej kompensacji ruchu. Jego chód jest płynny i przewidywalny, zoptymalizowany pod kątem minimalizacji strat energii. W praktyce każdy dodatkowy wat zużycia przekłada się na skrócenie czasu operacyjnego, dlatego efektywność energetyczna staje się kluczowym parametrem komercjalizacji.
Istotnym elementem rozwoju jest integracja systemów wizyjnych opartych na głębokim uczeniu. Robot humanoidalny Walker X potrafi rozpoznawać obiekty, analizować ich położenie w przestrzeni i manipulować nimi z rosnącą precyzją. Choć nadal nie dorównuje ludzkiej zręczności, postęp między rokiem 2022 a 2026 jest znaczący i wskazuje na przyspieszającą ewolucję tej technologii.
Unitree Robotics – H1
Unitree to firma, która zdobyła rozpoznawalność dzięki dynamicznym robotom czworonożnym, a w 2026 roku przenosi swoje doświadczenie na grunt humanoidów. Ich robot humanoidalny H1 stał się symbolem charakterystycznego dla Chin podejścia do technologii: szybkie iteracje projektowe, intensywna optymalizacja kosztów oraz wyraźne ukierunkowanie na produkcję seryjną.
H1 wyróżnia się dynamiczną stabilizacją ruchu i zdolnością poruszania się z prędkością, która jeszcze kilka lat temu była domeną wyspecjalizowanych laboratoriów badawczych. Systemy kontroli równowagi wspierane są przez algorytmy uczenia wzmacnianego trenowane w środowiskach symulacyjnych, co pozwala znacząco skrócić czas testów i przyspieszyć rozwój.
Jednak najważniejszym aspektem nie jest sama dynamika ruchu. Kluczowe znaczenie ma fakt, że roboty humanoidalne Unitree projektowane są z myślą o skalowalności. Standaryzacja komponentów, zoptymalizowany łańcuch dostaw i kontrola kosztów wskazują, że celem nie jest stworzenie najbardziej spektakularnej konstrukcji, lecz rozwiązania, które można produkować w dużych wolumenach.
Chiny nie koncentrują się na budowie „najlepszego robota świata” w sensie demonstracyjnym. Budują humanoida, którego można realnie wdrażać i wytwarzać tysiącami egzemplarzy.
Agibot – humanoidy przemysłowe
Agibot koncentruje się przede wszystkim na bezpośrednich zastosowaniach przemysłowych. Ich roboty humanoidalne nie są projektowane jako uniwersalne platformy demonstracyjne, lecz jako narzędzia przeznaczone do wykonywania konkretnych, zdefiniowanych zadań — takich jak przenoszenie paczek, sortowanie czy manipulacja komponentami na liniach produkcyjnych.
To istotna różnica w podejściu. W chińskim modelu rozwoju coraz częściej robot humanoidalny nie ma być wszechstronną maszyną zdolną do wszystkiego, lecz wyspecjalizowanym systemem zoptymalizowanym pod określony zakres czynności. Oprogramowanie trenowane jest pod konkretny scenariusz operacyjny, co zwiększa skuteczność i skraca czas wdrożenia. Zamiast maksymalnej elastyczności — priorytetem staje się wydajność w jednym, jasno zdefiniowanym obszarze.
W rezultacie chińskie roboty humanoidalne szybciej przechodzą z etapu testów laboratoryjnych do pilotaży w rzeczywistych zakładach produkcyjnych. Specjalizacja pozwala ograniczyć ryzyko wdrożeniowe i przyspieszyć proces komercjalizacji, co wpisuje się w szerszą strategię przemysłową Państwa Środka.
Roboty humanoidalne w USA – AI jako przewaga strategiczna
Roboty humanoidalne w USA rozwijają się w modelu skoncentrowanym przede wszystkim na sztucznej inteligencji i autonomii decyzyjnej. W przeciwieństwie do chińskiej strategii opartej na skali produkcji, amerykańskie podejście można określić jako „AI-first”. Oznacza to, że robot humanoidalny traktowany jest nie tylko jako maszyna wykonująca ruch, lecz jako inteligentna platforma zdolna do analizy środowiska, interpretowania poleceń i adaptacji do nowych zadań.
Firmy takie jak Boston Dynamics, Tesla czy Figure AI wykorzystują doświadczenie zdobyte w obszarze autonomicznych pojazdów, systemów wizyjnych oraz modeli językowych. Dzięki temu roboty humanoidalne projektowane w USA są silnie zintegrowane z algorytmami rozpoznawania obrazu, przetwarzania języka naturalnego oraz uczenia wzmacnianego. Kluczowe znaczenie ma oprogramowanie – to ono decyduje, czy humanoid potrafi działać w zmiennym środowisku i reagować w sposób zbliżony do człowieka.
W 2026 roku amerykański robot humanoidalny nadal znajduje się głównie w fazie pilotaży i testów przemysłowych, jednak skala inwestycji pokazuje, że sektor ten jest traktowany strategicznie. USA budują przewagę nie poprzez szybkie wdrożenia masowe, lecz poprzez rozwój inteligencji operacyjnej, która w przyszłości może umożliwić znacznie większą elastyczność zastosowań.
Boston Dynamics – Atlas
Atlas to dziś jeden z najbardziej rozpoznawalnych przykładów, czym mogą stać się nowoczesne roboty humanoidalne. Przez lata był symbolem laboratoryjnej perfekcji ruchu, jednak w 2026 roku jego elektryczna wersja wyraźnie sygnalizuje przejście z fazy demonstracyjnej w stronę realnych zastosowań komercyjnych.
Atlas nie jest już wyłącznie maszyną pokazującą spektakularne salta czy dynamiczne manewry. To robot humanoidalny, który potrafi manipulować obiektami, przenosić elementy w środowisku przemysłowym i reagować na zmiany otoczenia w czasie rzeczywistym. Integracja zaawansowanej kontroli ruchu z systemami percepcji sprawia, że jego działania są coraz bardziej przewidywalne i operacyjnie użyteczne.
Biomechanika Atlasa została dopracowana z niezwykłą precyzją. Każdy krok, obrót czy ruch ramienia jest analizowany pod kątem stabilności, efektywności energetycznej i minimalizacji ryzyka utraty równowagi. To nie tylko pokaz inżynierii — to próba stworzenia humanoida zdolnego do pracy w przestrzeni zaprojektowanej dla ludzi.
Boston Dynamics nie przyspiesza sztucznie komercjalizacji. Firma koncentruje się na testach w kontrolowanych scenariuszach przemysłowych, weryfikując realną użyteczność przed ewentualnym skalowaniem produkcji.
Tesla – Optimus
Optimus to dziś najbardziej medialny robot humanoidalny na świecie. Projekt rozwijany przez Teslę od początku budzi ogromne zainteresowanie, nie tylko ze względu na samą konstrukcję, lecz przede wszystkim na ambicje stojące za jego wdrożeniem. W przeciwieństwie do wielu konkurencyjnych projektów, Optimus nie jest wyłącznie demonstratorem technologii. Ma stać się elementem realnego ekosystemu produkcyjnego.
Tesla wykorzystuje doświadczenie zdobyte przy rozwoju autonomicznej jazdy. System kamer, przetwarzanie obrazu w czasie rzeczywistym, sieci neuronowe uczące się na ogromnych zbiorach danych — to fundament, który został przeniesiony do świata robotów humanoidalnych. Optimus ma analizować otoczenie podobnie jak autonomiczny samochód: rozpoznawać obiekty, oceniać odległości i podejmować decyzje na podstawie danych sensorycznych.
Kluczową kwestią pozostaje jednak ekonomia. Jeśli Tesla zrealizuje zapowiedzi dotyczące kosztu produkcji, roboty humanoidalne mogą wejść w fazę szerszej dostępności, a nie pozostać niszowym rozwiązaniem przemysłowym. W 2026 roku Optimus jest intensywnie testowany w fabrykach Tesli, gdzie wykonuje powtarzalne zadania produkcyjne. To środowisko kontrolowane, ale strategiczne — pozwala firmie rozwijać technologię w praktyce, a nie tylko w laboratorium.
Optimus wciąż dojrzewa, lecz jego potencjał wykracza poza samą robotykę. To projekt, który ma połączyć sztuczną inteligencję, masową produkcję i humanoidalną formę w jednym, skalowalnym systemie.
Figure AI – Figure 02
Figure AI to jeden z najciekawszych przykładów integracji, jaką osiągają dziś roboty humanoidalne dzięki modelom językowym. Firma od początku stawia na połączenie biomechaniki z zaawansowaną sztuczną inteligencją, a współpraca z OpenAI nadała projektowi wyraźny kierunek: humanoid ma nie tylko wykonywać ruch, lecz rozumieć polecenie.
W praktyce oznacza to, że robot humanoidalny może interpretować instrukcje w języku naturalnym, analizować kontekst i dostosowywać działanie bez konieczności szczegółowego programowania każdego kroku. Zamiast definiować sekwencję ruchów w kodzie, operator może wydać opisowe polecenie — na przykład dotyczące przeniesienia konkretnego obiektu czy reorganizacji stanowiska pracy.
To jakościowa zmiana w relacji człowiek–maszyna. Roboty humanoidalne przestają być systemami wymagającymi specjalistycznego programowania, a zaczynają funkcjonować jako platformy reagujące na komunikację w sposób bardziej intuicyjny. Oczywiście w 2026 roku wciąż wymaga to nadzoru i kontroli, ale kierunek jest wyraźny: zwiększenie elastyczności operacyjnej poprzez integrację języka i percepcji z mechaniką.
Figure AI pokazuje, że przyszłość humanoidów może zależeć nie tylko od ich konstrukcji, lecz przede wszystkim od zdolności rozumienia człowieka.
Roboty humanoidalne w Europie – precyzja, badania i specjalizacja zamiast masowej produkcji
Roboty humanoidalne w Europie rozwijają się w modelu bardziej badawczym niż komercyjnym. W przeciwieństwie do Chin i USA, gdzie nacisk kładziony jest na skalę produkcji lub integrację z przemysłem, europejskie projekty koncentrują się na precyzji, interakcji oraz zastosowaniach naukowych i medycznych.
W wielu ośrodkach badawczych humanoidy wykorzystywane są jako platformy do testowania manipulacji, percepcji i współpracy człowiek–robot. Europejski robot humanoidalny często powstaje w kontekście robotyki kosmicznej, rehabilitacji lub badań nad rozwojem poznawczym, a nie jako bezpośredni konkurent pracownika magazynu.
To podejście sprawia, że Europa nie dominuje ilościowo, ale wnosi istotny wkład jakościowy. Rozwijane tu technologie dotyczące precyzyjnych chwytaków, czujników siły czy interakcji społecznej mogą w przyszłości stać się fundamentem bardziej zaawansowanych komercyjnych robotów humanoidalnych.
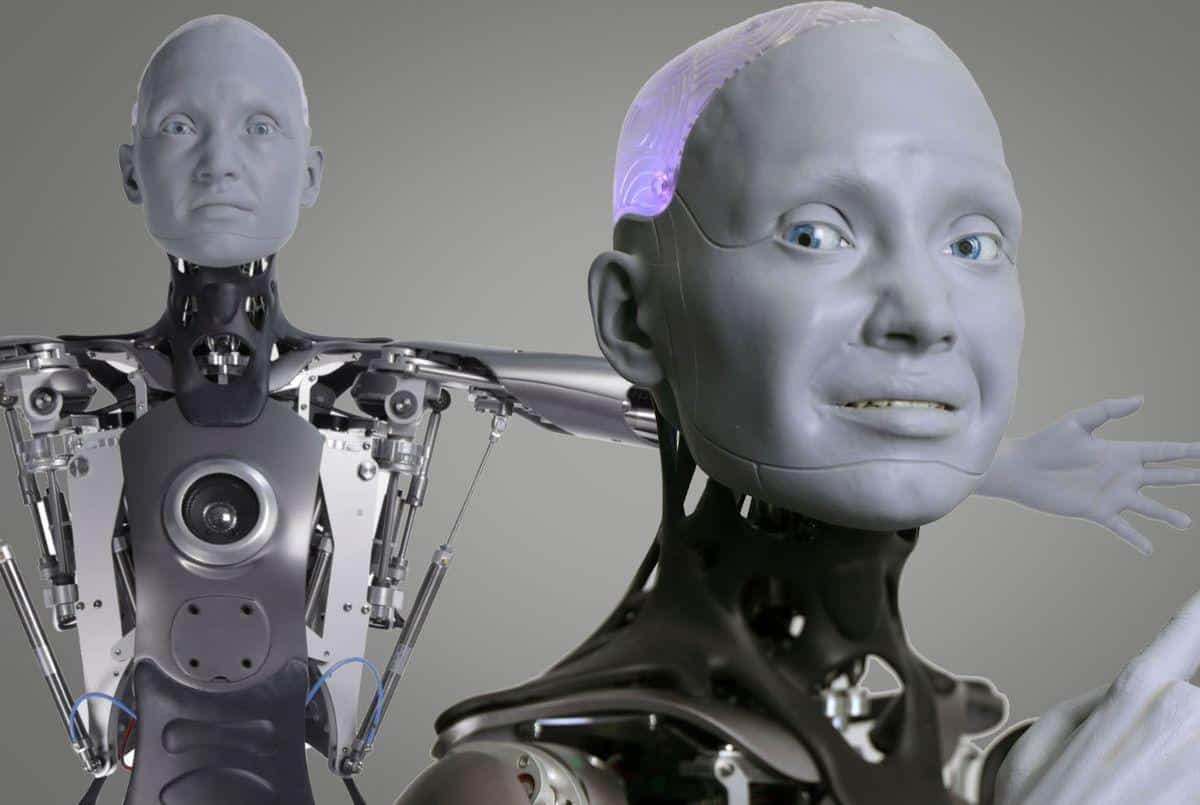
Robot humanoidalny Ameca – najbardziej zaawansowana twarz interakcji człowiek–maszyna
Robot humanoidalny Ameca to jeden z najbardziej zaawansowanych projektów w obszarze interakcji człowiek–maszyna. W przeciwieństwie do humanoidów projektowanych pod kątem pracy fizycznej, Ameca koncentruje się na komunikacji i ekspresji. Jej konstrukcja nie została zoptymalizowana pod kątem siły czy dynamicznego poruszania się, lecz pod kątem realizmu twarzy i płynności reakcji.
Największym wyróżnikiem Ameki jest mimika. Silikonowa powłoka twarzy oraz precyzyjne mechanizmy odpowiedzialne za mikroekspresje pozwalają odwzorować subtelne ruchy brwi, ust i policzków. Dzięki temu roboty humanoidalne tego typu wywołują zupełnie inną reakcję emocjonalną niż klasyczne konstrukcje przemysłowe. Interakcja z maszyną przestaje być czysto techniczna, a zaczyna przypominać rozmowę z cyfrowym asystentem w fizycznej formie.
Ameca jest często integrowana z modelami językowymi, co pozwala jej prowadzić dialog w czasie rzeczywistym i reagować na pytania w sposób kontekstowy. To sprawia, że robot humanoidalny może pełnić funkcję recepcjonisty, przewodnika czy demonstratora technologii w przestrzeniach publicznych.
Choć Ameca nie jest konkurencją dla człowieka w pracy fizycznej, stanowi ważny krok w rozwoju społecznego wymiaru robotów humanoidalnych. Pokazuje, że przyszłość humanoidów nie ogranicza się do przemysłu, lecz obejmuje również obszar komunikacji i relacji z użytkownikiem.
Może Cię zainteresować: Ameca – najbardziej ekspresyjny humanoid świata. Co potrafi naprawdę?
DLR – Justin
Robot Justin rozwijany przez niemieckie DLR (Deutsches Zentrum für Luft- und Raumfahrt) jest przykładem europejskiego podejścia do rozwoju humanoidów, w którym kluczową rolę odgrywa precyzja manipulacji. To nie jest magazynowy robot humanoidalny ani konstrukcja projektowana pod kątem masowych wdrożeń przemysłowych. Justin powstał z myślą o pracy w środowiskach wymagających najwyższej dokładności i niezawodności.
Jego głównym przeznaczeniem są zastosowania kosmiczne oraz zadania realizowane w warunkach, w których obecność człowieka jest utrudniona lub niebezpieczna. Mowa tu o obsłudze narzędzi, montażu komponentów czy teleoperacji wykonywanej z dużych odległości. Konstrukcja robota została zoptymalizowana pod kątem stabilności i precyzji, a nie szybkości czy siły fizycznej.
Najbardziej zaawansowanym elementem Justina są jego dłonie wyposażone w czujniki siły i dotyku. To właśnie manipulacja, a nie samo poruszanie się, pozostaje jednym z największych wyzwań w rozwoju robotów humanoidalnych. Chód dwunożny został w dużej mierze opanowany, jednak precyzyjne chwytanie i kontrola nacisku wciąż wymagają intensywnych badań.
Istituto Italiano di Tecnologia – iCub
iCub to jeden z najbardziej rozpoznawalnych europejskich projektów badawczych w obszarze robotów humanoidalnych. W przeciwieństwie do konstrukcji rozwijanych z myślą o przemyśle, iCub nie jest projektowany jako pracownik magazynu czy linii produkcyjnej. To przede wszystkim platforma naukowa, wykorzystywana do badań nad procesami uczenia się, sztuczną percepcją oraz interakcją człowiek–robot.
Konstrukcja robota, celowo utrzymana w proporcjach dziecka, pozwala analizować rozwój sensoryczno-motoryczny w warunkach kontrolowanych eksperymentów. iCub służy do badania tego, w jaki sposób systemy sztucznej inteligencji mogą uczyć się poprzez doświadczenie, obserwację i interakcję z otoczeniem. Testowane są zarówno mechanizmy chwytania i koordynacji ruchowej, jak i zdolności poznawcze związane z rozpoznawaniem obiektów czy reagowaniem na bodźce społeczne.
Znaczenie tego projektu wykracza poza samą robotykę akademicką. Przyszłość robotów humanoidalnych nie zależy wyłącznie od siły, stabilności czy wydajności energetycznej, lecz od zdolności adaptacji do zmiennego środowiska. Europa w tym obszarze buduje solidne fundamenty naukowe, które w kolejnych latach mogą zostać przeniesione do komercyjnych konstrukcji humanoidów.

Porównanie: roboty humanoidalne 2026 – Chiny, USA, Europa
W 2026 roku roboty humanoidalne rozwijają się w trzech wyraźnie odmiennych modelach technologicznych i biznesowych. Chiny stawiają na skalę i szybkie wdrożenia przemysłowe, USA koncentrują się na integracji zaawansowanej sztucznej inteligencji z biomechaniką, a Europa buduje kompetencje w obszarze precyzji, badań i interakcji człowiek–maszyna. Każdy z tych regionów reprezentuje inną strategię rozwoju, inne priorytety i inne tempo komercjalizacji.
Poniższe zestawienie pokazuje, jak konkretne roboty humanoidalne 2026 wpisują się w ten globalny wyścig oraz czym różni się podejście do projektowania i wdrażania humanoidów w Chinach, USA i Europie.
| Kraj / Region | Firma | Model | Główne zastosowanie | Co wyróżnia danego robota humanoidalnego | Status 2026 |
|---|---|---|---|---|---|
| Chiny | UBTECH Robotics | Walker X | Przemysł, edukacja, demonstracje technologii | Stabilny chód, zaawansowana kontrola równowagi, integracja z AI wizyjną | Testy przemysłowe, wdrożenia pilotażowe |
| Chiny | Unitree Robotics | H1 | Logistyka, badania ruchu dynamicznego | Duża prędkość poruszania się, optymalizacja kosztów produkcji, dynamiczna stabilizacja | Intensywny rozwój i pierwsze wdrożenia |
| Chiny | Agibot | Humanoidy przemysłowe | Magazyny i sortownie | Projektowane pod konkretne zadania logistyczne, szybkie pilotaże w przemyśle | Wdrożenia pilotażowe |
| USA | Boston Dynamics | Atlas (wersja elektryczna) | Produkcja, manipulacja obiektami | Bardzo wysoka dynamika ruchu, precyzyjna manipulacja, zaawansowana biomechanika | Testy komercyjne |
| USA | Tesla | Optimus | Fabryki, produkcja | Integracja z AI Tesli, wykorzystanie kamer i sieci neuronowych z systemów autonomicznych | Testy wewnętrzne w fabrykach Tesli |
| USA | Figure AI | Figure 02 | Logistyka i magazyny | Integracja z modelami językowymi, rozumienie poleceń w języku naturalnym | Pilotaże przemysłowe |
| USA | Agility Robotics | Digit | Magazyny (m.in. testy z Amazon) | Projekt od początku logistyczny, fabryka produkcyjna, realne wdrożenia | Komercyjne testy operacyjne |
| UK | Engineered Arts | Ameca | Obsługa klienta, interakcja społeczna | Najbardziej realistyczna mimika twarzy, integracja z AI konwersacyjną | Wdrożenia eventowe i komercyjne |
| Niemcy | DLR | Justin | Robotyka kosmiczna, telemanipulacja | Zaawansowane dłonie z czujnikami siły, precyzyjna manipulacja | Projekt badawczy |
| Włochy | Istituto Italiano di Tecnologia | iCub | Badania nad uczeniem i percepcją | Platforma badawcza do analizy procesów poznawczych i motorycznych | Projekt naukowy |
💡 Uwaga: Zestawienie obejmuje wybrane, najbardziej reprezentatywne projekty rozwijane w 2026 roku. Rynek robotów humanoidalnych dynamicznie się zmienia, a wiele konstrukcji pozostaje w fazie pilotaży lub badań. Status komercjalizacji oraz zakres zastosowań poszczególnych modeli może ulec istotnym zmianom w ciągu najbliższych lat.

Czy robot humanoidalny jest już konkurencją dla człowieka?
W 2026 roku to pytanie przestało mieć charakter futurystyczny. Stało się pytaniem biznesowym.
Nie zadają go już wyłącznie entuzjaści technologii czy autorzy science fiction. Zadają je dyrektorzy operacyjni, właściciele centrów logistycznych, inwestorzy oraz decydenci państwowi. Bo jeśli robot humanoidalny jest w stanie realnie przejąć część ludzkich zadań, konsekwencje wykraczają daleko poza samą robotykę. Dotyczą struktury kosztów przedsiębiorstw, modelu zatrudnienia i całych łańcuchów wartości w gospodarce.
Potencjalne wdrożenie humanoidów nie jest więc wyłącznie kwestią technologiczną. To decyzja ekonomiczna i strategiczna. W grę wchodzą nie tylko możliwości maszyn, ale także opłacalność, niezawodność oraz wpływ społeczny.
Jednocześnie odpowiedź na to pytanie nie jest jednoznaczna. Roboty humanoidalne w 2026 roku potrafią coraz więcej, ale ich zdolność do pełnej konkurencji z człowiekiem zależy od sektora, rodzaju pracy oraz dojrzałości technologii.
1️⃣ W jakich obszarach roboty humanoidalne zaczynają konkurować?
W środowiskach takich jak magazyny, centra logistyczne czy linie produkcyjne roboty humanoidalne zaczynają być realną alternatywą dla człowieka, choć wyłącznie w ściśle określonym zakresie. Ich przewaga nie wynika z większej inteligencji, lecz z przewidywalności i powtarzalności działania.
Człowiek męczy się, popełnia błędy, choruje i wymaga przerw. To naturalne ograniczenia biologiczne. Robot humanoidalny nie odczuwa zmęczenia ani presji czasu, może pracować w systemie zmianowym niemal bez przerw i wykonywać ten sam ruch z identyczną precyzją przez wiele godzin. W zadaniach opartych na powtarzalnych czynnościach — takich jak przenoszenie paczek, odkładanie elementów czy sortowanie — różnica wydajności między człowiekiem a maszyną zaczyna się zmniejszać.
Gdy do analizy dołączymy rosnące koszty pracy w krajach rozwiniętych, rachunek ekonomiczny staje się coraz bardziej istotny. W określonych warunkach wdrożenie humanoida może być uzasadnione finansowo.
Należy jednak podkreślić, że mówimy o bardzo wąskim wycinku zadań. Roboty humanoidalne w 2026 roku konkurują z człowiekiem głównie tam, gdzie praca jest powtarzalna, fizyczna i łatwa do standaryzacji.
2️⃣ Gdzie robot humanoidalny nie jest konkurencją?
W 2026 roku żaden robot humanoidalny nie podejmuje autonomicznych decyzji strategicznych w sensie ludzkim. Może analizować ogromne zbiory danych, generować odpowiedzi na podstawie modeli językowych i symulować proces wnioskowania, jednak nie posiada świadomości, intuicji ani odpowiedzialności za skutki swoich działań. Różnica między algorytmiczną symulacją decyzji a rzeczywistym rozumieniem kontekstu pozostaje fundamentalna.
Nawet najbardziej zaawansowane konstrukcje, takie jak Ameca, operują w ramach symulacji emocji. Realistyczna mimika czy dopasowanie tonu wypowiedzi nie oznaczają przeżywania uczuć. Człowiek reaguje empatycznie, intuicyjnie dostosowuje komunikację do sytuacji i odczytuje subtelne niuanse społeczne, które wykraczają poza analizę danych.
Robot humanoidalny może interpretować ton głosu, analizować wyraz twarzy czy rozpoznawać wzorce zachowań, ale nadal jest to przetwarzanie informacji, a nie doświadczenie emocjonalne. W zawodach opartych na relacjach — takich jak psychologia, medycyna czy edukacja — konkurencja ze strony humanoidów jest obecnie bardzo ograniczona. To obszary, w których ludzka obecność, odpowiedzialność i zaufanie pozostają kluczowe.

Zestawienie: roboty humanoidalne 2026 – cena i dostępność
| Robot | Firma | Kraj | Główne zastosowanie | Status 2026 | Szacunkowa cena (USD) | Dostępność |
|---|---|---|---|---|---|---|
| Atlas (wersja elektryczna) | Boston Dynamics | USA | Przemysł, manipulacja | Testy przemysłowe | Brak oficjalnej ceny (szac. >100 000 USD) | Ograniczone wdrożenia pilotażowe |
| Optimus | Tesla | USA | Produkcja, fabryki | Testy wewnętrzne | Docelowo <25 000 USD (deklaracja) | Wewnętrzne testy Tesli |
| Figure 02 | Figure AI | USA | Logistyka | Pilotaże | Szac. 50 000–100 000 USD | Pilotaże przemysłowe |
| Digit | Agility Robotics | USA | Magazyny | Testy operacyjne | Szac. 40 000–80 000 USD | Ograniczone wdrożenia (m.in. Amazon) |
| Walker X | UBTECH Robotics | Chiny | Przemysł, edukacja | Testy przemysłowe | Brak oficjalnych danych | Wdrożenia pilotażowe |
| H1 | Unitree Robotics | Chiny | Logistyka, badania ruchu | Wczesna komercjalizacja | Ok. 90 000 USD (deklaracje rynkowe) | Ograniczona sprzedaż |
| Humanoidy przemysłowe | Agibot | Chiny | Sortowanie, magazyny | Pilotaże | Brak publicznych danych | Wdrożenia testowe |
| Ameca | Engineered Arts | UK | Interakcja, eventy | Komercyjna | Szac. 100 000+ USD | Sprzedaż komercyjna |
| Justin | DLR | Niemcy | Kosmos, badania | Projekt badawczy | Niedostępny komercyjnie | Laboratoria |
| iCub | Istituto Italiano di Tecnologia | Włochy | Badania naukowe | Platforma badawcza | Niedostępny komercyjnie | Instytuty badawcze |
💡 Ważna informacja
Większość producentów robotów humanoidalnych nie publikuje oficjalnych cenników detalicznych. Podane wartości mają charakter szacunkowy i wynikają z analiz rynkowych, wypowiedzi producentów lub wycen projektów pilotażowych. W 2026 roku rynek nadal znajduje się w fazie wczesnej komercjalizacji.
Może Cię również zainteresować:
Najważniejsze firmy AI na świecie – kto kontroluje sztuczną inteligencję? Raport technologiczny 2026
Prognoza 2030–2035: dokąd zmierzają roboty humanoidalne?
Lata 2030–2035 będą okresem prawdziwej weryfikacji dla rynku, na którym dziś funkcjonują roboty humanoidalne. To właśnie w tej dekadzie okaże się, czy obecny entuzjazm inwestycyjny i szybkie tempo rozwoju przełożą się na trwałą obecność humanoidów w gospodarce, czy też pozostaną one wyspecjalizowanym narzędziem dla wybranych sektorów.
Pierwszym czynnikiem, który zdecyduje o kierunku rozwoju, będzie ekonomia. Jeżeli koszty baterii, napędów i komponentów mechatronicznych będą dalej spadać, a produkcja osiągnie większą skalę, robot humanoidalny może stać się rozwiązaniem opłacalnym nie tylko w pilotażach, ale w pełnych wdrożeniach operacyjnych. Próg cenowy rzędu kilkunastu–kilkudziesięciu tysięcy dolarów za jednostkę będzie punktem, w którym firmy zaczną podejmować decyzje nie eksperymentalne, lecz strategiczne.
Równolegle rozwijać się będzie autonomia. Integracja modeli językowych z systemami percepcji wizualnej i czujnikami środowiskowymi sprawi, że roboty humanoidalne będą lepiej rozumieć kontekst sytuacyjny, a nie tylko reagować na zaprogramowane polecenia. Oznacza to większą elastyczność w środowiskach dynamicznych, takich jak magazyny, budowy czy przestrzenie publiczne.
Nie należy jednak zakładać gwałtownej rewolucji. Najbardziej realistyczny scenariusz zakłada stopniową adaptację. Do 2035 roku humanoidy mogą stać się stałym elementem wybranych sektorów – szczególnie tam, gdzie praca jest monotonna, niebezpieczna lub fizycznie obciążająca. Nie zastąpią masowo ludzi, lecz będą funkcjonować obok nich, zmieniając strukturę zadań i odpowiedzialności.
Prawdziwa zmiana nie polega więc na całkowitej automatyzacji pracy, lecz na redefinicji roli człowieka w systemach, w których roboty humanoidalne staną się jednym z podstawowych narzędzi operacyjnych.
Wnioski i podsumowanie
Rok 2026 nie przynosi rewolucji, lecz wyraźny punkt zwrotny. Roboty humanoidalne przestają być wyłącznie demonstracją technologii, a zaczynają funkcjonować w realnych środowiskach przemysłowych i usługowych. Nadal są na etapie dojrzewania, ale ich obecność w strategiach największych gospodarek świata pokazuje, że to nie chwilowy trend.
Najważniejsze wnioski z analizy:
-
Roboty humanoidalne konkurują z człowiekiem głównie w zadaniach powtarzalnych i fizycznych, szczególnie w logistyce i przemyśle.
-
Nie są konkurencją w obszarach wymagających empatii, odpowiedzialności i myślenia strategicznego.
-
Chiny budują przewagę skalą i kosztem, USA stawiają na AI i autonomię, Europa na precyzję i badania.
-
Kluczowym czynnikiem przyszłości będzie ekonomia — spadek kosztów i zwiększenie autonomii operacyjnej.
-
Najbardziej realistyczny scenariusz to współpraca człowieka i humanoida, a nie masowe zastąpienie pracy ludzkiej.
W 2026 roku robot humanoidalny nie przejmuje rynku pracy, ale zaczyna zmieniać jego strukturę. To nie nagła rewolucja, lecz proces, który będzie rozwijał się stopniowo w kolejnych latach.
Może Cię zainteresować: Roboty opiekuńcze dla seniorów – jak Japonia buduje system opieki przyszłości (2026)
FAQ – Roboty humanoidalne 2026
Czym są roboty humanoidalne?
Czy robot humanoidalny może zastąpić człowieka w pracy?
W jakich krajach rozwijają się najbardziej zaawansowane roboty humanoidalne?
Ile kosztuje robot humanoidalny w 2026 roku?
Jak długo robot humanoidalny może pracować na jednym ładowaniu?
Czy roboty humanoidalne są bezpieczne?
Czy robot humanoidalny ma świadomość?
Jak będzie wyglądać przyszłość robotów humanoidalnych do 2035 roku?
Może Cię zainteresować: Czy sztuczna inteligencja (AI) może mieć świadomość? Nauka, filozofia i fakty 2026
Dziękujemy, że przeczytałaś/eś nasz artykuł do końca.
Śledź techoteka.pl i bądź na bieżąco z nowinkami technologicznymi! Obserwuj nas na Facebooku.